


























A flying start towards minimizing removal times
19.04.2021
The production process for making injection-molded plastic parts consists of innumerable phases which all have an effect on the total cycle time. One of these is the finished parts removal sequence, where the minimization of mold-open time contributes substantially to shortening the cycle time.
 Visualization of a removal procedure.
Visualization of a removal procedure.
Modern robot systems offer the advantages of highly efficient motors and weight-optimized axes. Here, WITTMANN uses a well-balanced material mix of thin steel sheet combined with aluminum. The choice of materials in each case depends on the specific application and the stroke length of the removal robots. The available model range covers highly rigid combinations for load capacities of up to 150 kg as well as weight-optimized solutions for acceleration rates of up to 80 m/s².
However, even the best design makes no difference unless the response times of the appliances are able to keep up with it. This is why WITTMANN has been operating with a 4 ms cycle time for several years, which is a vital factor in the command processing time of the robot’s teach-program and thus constitutes an essential component of every WITTMANN robot application. All WITTMANN robots – from the compact models of the PRIMUS series right up to the large WX appliances – operate on the basis of this cycle time, regardless of the robot’s actual control system version.
Another significant aspect is the efficient conversion of command input and control signals into appropriate travel movements. This is where the patented SmartRemoval function from WITTMANN – installed in all robots as standard – shows its advantages. The main feature of SmartRemoval is its anticipatory inward movement of the robot axis – in top-entry models generally the vertical axis, and the horizontal axis in horizontal appliances.
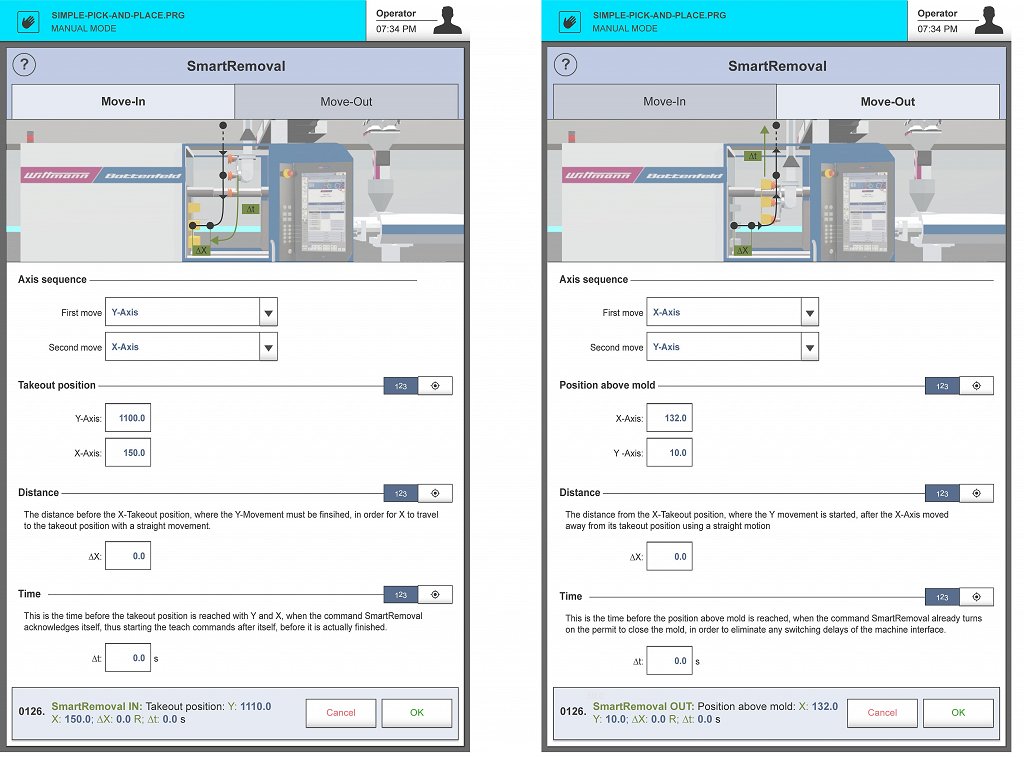 Input window for SmartRemoval Move In (left) and SmartRemoval Move Out on the WITTMANN R9 control system (W9 & WX series).
Input window for SmartRemoval Move In (left) and SmartRemoval Move Out on the WITTMANN R9 control system (W9 & WX series).
 R9 robot control system from WITTMANN, on the left with display of the home screen, on the right with display of a work cell connected to R9
R9 robot control system from WITTMANN, on the left with display of the home screen, on the right with display of a work cell connected to R9
The analysis of the injection molding machine’s cycle permits initiation of the anticipatory axial movement before the platen is completely opened. No special interface is required to carry out this analysis, since EUROMAP E12 (in older machine models) or EUROMAP E67 already provides the necessary signals for calculation. SmartRemoval makes it possible for the robot to reach its maximum speed in the mold area at a very early stage. By almost complete elimination of the acceleration phase after the moving mold platen has reached its end position, in combination with phased vacuum monitoring of the finished parts, mold-open times are reduced by 10 to 30 per cent.
For complex parts which offer no facility for a stable hold in the ejector’s end position and thus complicate the task of programming a safe transfer to the removal gripper, the WITTMANN robot control system provides a special feature known as the Push function. Another common form of this function found on the market for this type of requirements is releasing the brake on the robot’s demolding axis. However, this can have an extremely adverse effect, since in such cases the ejector presses the part directly into the gripper and consequently onto the demolding axis. As a result, deformations and other defects may occur on the finished parts, and in the long run also damage the mechanism of the removal device. By contrast, the Push function from WITTMANN enables a gentle, torque-monitored transfer of the parts. Here, the actual presence of a finished part is continually monitored by what is known as the iVac function, the freely programmable vacuum monitoring system from WITTMANN. iVac offers the advantage of having the molded part picked up with only a fraction of the necessary vacuum pressure, together with a simultaneous start of the removal sequence. During the robot’s outward movement, the vacuum pressure rises to the maximum level. As soon as the set reference pressure for the molded part has been reached, the release signal for closing the mold is given. This release can already take place several tenths of a second before the robot leaves the mold area. In this way, signal delays in the interface between the robot and the injection molding machine are compensated, thus minimizing the mold-open time.
With the standard functions of the WITTMANN robot control system as described above, injection molders receive not only a sophisticated system for optimizing applications, but also continuous monitoring of manufacturing processes.